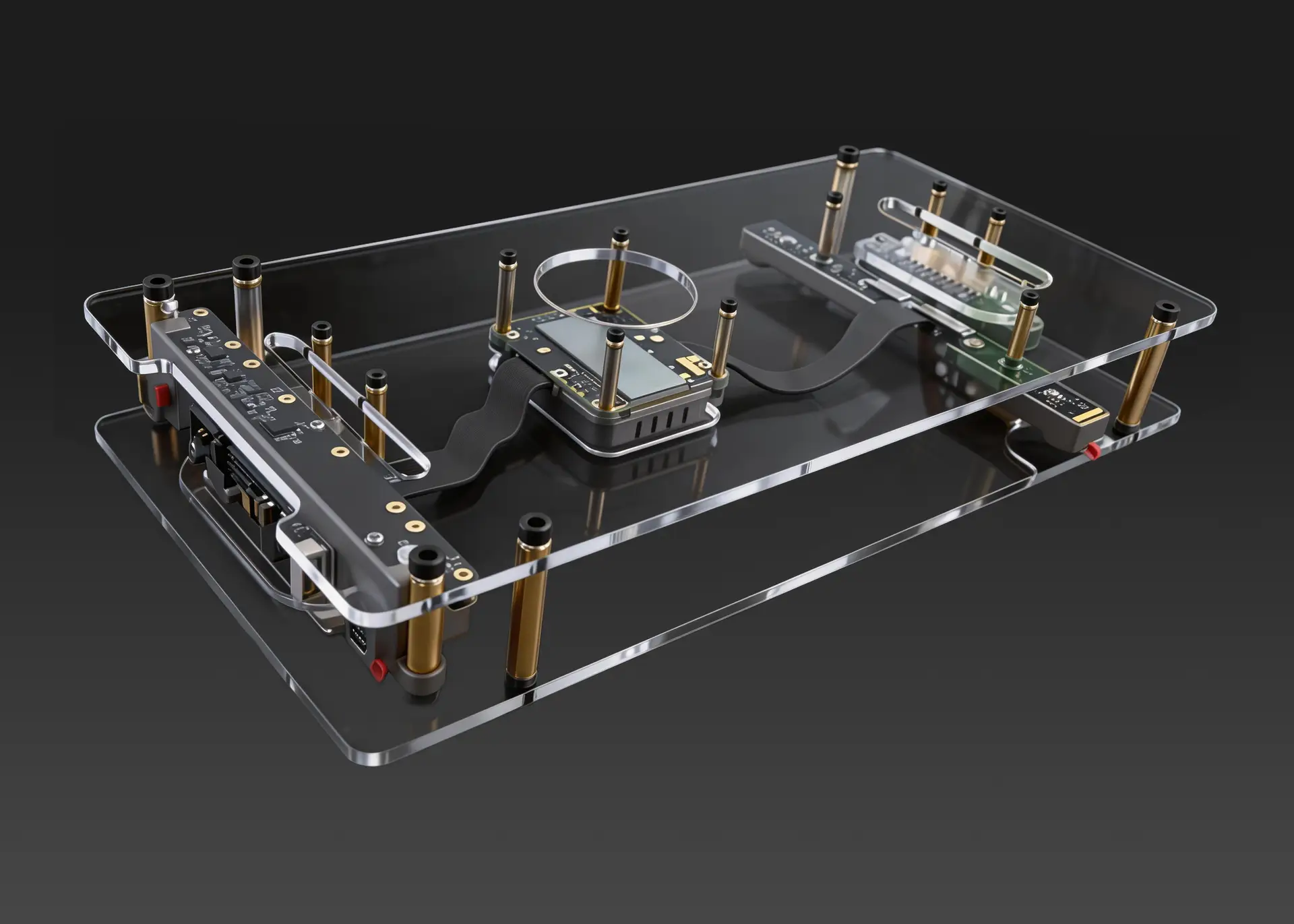
Feynman U2是专为微飞VIO应用设计的迷你国产单/双深度图四目100万像素全局快门感知、避障相机模组。集成4颗百万像素全局快门摄像头、IMU,支持硬件帧同步、硬件时间戳、ISP快速光变调试、室外强光炫光整改适配、板载双目深度图计算。
可同时输出4目四路原始图像数据流、1路或2路640×480@30/15fps深度流、双目特征点2×200@30fps、IMU数据,可用于微型/小型无人机、机器狗室外环境VIO/vSLAM前端采集、避障应用。
同时支持多机同步与触发功能,可翻倍为6目、8目组合,传感器间硬件帧同步、硬件时间戳、支持全局时间戳,整套模组以轻便重量、小巧尺寸,与其他传感器如GNSS、Lidar搭配做多传感器融合应用。